Заведующий лабораторией:
Тулешов Амандык Куатович, доктор технических наук, профессор, член-корреспондент НАН РК, академик НИА РК, МИА
Научные интересы: кинематика и динамика рычажных механизмов и машин-агрегатов; динамика и управление поточными и роторными машинами; математическое и компьютерное моделирование механических систем; робототехника, интеллектуальные и САПР-системы.
Контакты: e-mail: aman_58@mail.ru
Общая численность сотрудников: 10 человек
Области исследований лаборатории: Методы математического моделирования и программы численного расчета динамического синтеза, исследования кинематики и динамики, устойчивости и точности системы автоматического управления (САУ) машин и роботов. Автоматизация производства, системы автоматизации, интеллектуальные системы, системы технического зрения, решения искусственного интеллекта в робототехнике.
Гранты и проекты
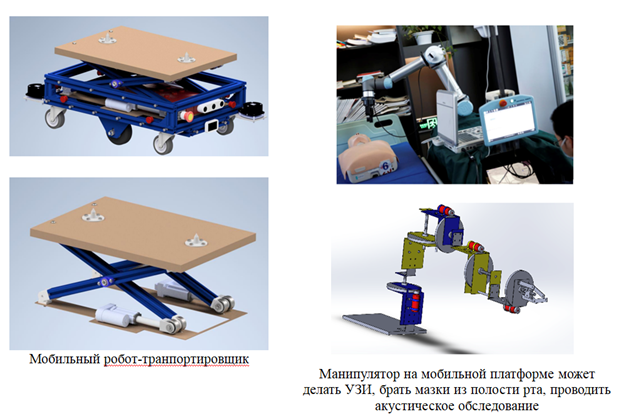
1. 160-16-ГК «Создание опытного производства и технологии разработки мобильных роботов с подъемником для автоматизации погрузочно-разгрузочных и транспортных операций», по ГК АО «Фонд науки» №280 от 23 декабря 2016 года, на 2017-2019 гг.
Практическое применение: Создание опытного производства, мобильный робот с подъемником, САПР-подъемников, транспортный мобильный робот (платформа).
2. AP09260493 «Разработка аппаратно-программного комплекса воздушной роботизированной системы для мониторинга качества руд в естественном залегании» по ГФ МОН РК на 2021-2023 гг
Практическое применение: спектральный анализ и рентгенорадиометрическое сканирование руды; маркшейдерская съемка и спектральный анализ элементного состава вещества горных пород и руд.
3. OR11465454 «Разработка и внедрение медицинских роботов и интеллектуальных систем в Казахстане для совершенствования системы диагностики и лечения пациентов в условиях пандемии» ПЦФ МОН РК на 2021-2022 гг.
Практическое применение: Робототехнический комплекс медицинских мобильных роботов: робот-помощник; робот-дезинфектор; робот-пробоотборник и мобильный транспортный робот.
Список публикаций и монографий, патенты
1. Dynamic analyses of a clutch of crank press, News of the National Academy of Sciences of the Republic of Kazakhstan, Series of Geology and Technical Sciences (2019), 5 (437), pp. 114-123. DOI: 10.32014/2019.2518-170X.132. Tuleshov A.K., Jomartov, A.A., Kuatova, M.J., Halicioglu, R.
2. Dynamic Model of a Crank Press in the Process of Braking (2020), Mechanisms and Machine Science, 78, pp. 141-150. DOI: 10.1007/978-3-030-30036-4_12. Tuleshov A.K., Jomartov, A., Kuatova, M.
3. Designing of the stephenson ii six-link linkage actuator for servo mechanical press, International Journal of Mechanical and Production Engineering Research and Development, 2020, 10(2), стр. 501–512, IJMPERDAPR202053, Tuleshov A.K., Jomartov, A., Jamalov, N., Kuatova, K., Kaimov, A.
4. Optimal synthesis of planar linkages, News of the National Academy of Sciences of the Republic of Kazakhstan, Series of Geology and Technical Sciences, 2020, 1(439), стр. 172–180 Tuleshov A.K., Jomartov, А.А., Ibrayev, S., Jamalov, N.K., Halicioglu, R.
5. Synthesis of four-bar linkage with adjustable crank length for multi-path generation, International Journal of Mechanical Engineering and Robotics Research, 2020, 9(4), стр. 489–495 Tuleshov A.K., Ibrayev, S., Jomartov, A., Tuleshov, A., etc.
6. Kinematic synthesis method and eccentricity effects of a Stephenson mechanism, Mechanical Sciences, 2021, 12(1), стр. 1–8 Tuleshov A.K., Halicioglu, R., Shadymanova, A., Kuatova, M.
7. Walking Robot Leg Design Based on Translatory Straight-Line Generator, CISM International Centre for Mechanical Sciences, Courses and Lectures, 2021, 601, стр. 264–271 Tuleshov A.K., Ibrayev, S., Jamalov, N., Ibrayeva, A., Bissembayev, K., etc.
8. Dynamic Model of Servo Mechanical Press, CISM International Centre for Mechanical Sciences, Courses and Lectures, 2021, 601, стр. 170–178, Tuleshov A.K., Jomartov, A., Jamalov, N., Temirbekov, Y., Bostanov, B.etc.
Виды оказываемых услуг:
Разработка интеллектуальных робототехнических комплексов
Разработка промышленных образцов систем автоматизации
Производство мобильных роботов
Материально-техническая база/инфраструктура для оказания услуг:
1. Комплект аппаратной части системы управления мобильного робота с подъемником
2. Лазерный станок для резки и гравировки,
3. 3Dпринтер INTERPRINT HAMMER PRO